Arbeitsplatzgestaltung eines Sortierarbeitsplatzes
↑ zurück zur Hauptseite Ergonomie korrektiv
- verwendete Abkürzungen zu bestimmten Funktionen: s. Tutorial: Grundfunktionen
- Kontextmenü: Aufruf von Funktionen mit rechter Maustaste
Zielstellung
Ausgangssituation:
- Bei einer Produktherstellung erfolgt nach einer bestimmten Bearbeitungsstufe eine Kontrolle der Produkte, die in Horden gelagert sind. Produkte mit Qualitätsmängeln werden markiert und die Horden danach auf einem Tisch gelagert. Am betrachteten Sortierarbeitsplatz ziehen sich die Beschäftigten diese Horden auf ihren Arbeitstisch und sortieren markierte/mangelhafte Produkte aus, indem sie diese in leere Horden, die sich rechts von ihnen befinden, umlagern und auf der rechten Seite des Tisches an den Rand schieben. Dort werden sie dann in einem späteren Bearbeitungsschritt abtransportiert (nicht betrachtet). Horden mit mängelfreien Produkten werden links vom Beschäftigten zu 3 Stück übereinander gestapelt und danach in einen Hordenwagen eingelagert.

Ziel:
Insgesamt ist eine rechnerunterstützte Untersuchung durchzuführen. Dabei werden Funktionalitäten der Ergonomietools und des Menschmodells genutzt.
- Bestimmung der gegebenen Arbeitsplatzverhältnisse und Einzelhaltungen und deren orientierende Bewertung
- Ableitung von Veränderungsmaßnahmen und entsprechender ergonomischer Anforderungen
- In der Übung werden methodische Schritte, Ergebnisse und Zwischenergebnisse sowie Schlussfolgerungen diskutiert
Nutzergruppe/ Referenzpersonen i. S. worst case:
- Männer, Frauen: 22-55 Jahre (getroffene Annahme) ==> im realen Prozess sind i. allg. nur einzelne Nutzer aus der Nutzergruppe anzutreffen
- Simulation: für kritische Grenzperzentile und Spektrum anthropometrischer Eigenschaften (Geschlecht, Alter, Perzentil, Akzeleration)
- F5: 55 Jahre, F95: 22 Jahre
Lernziel:
- Methodisches Vorgehen bei rechnerunterstützter Nachbildung des Ist-Zustandes
- Planung korrektiver Maßnahmen - Schrittfolge
- Einbeziehung normativer Anforderungen
- Ableitung ergonomischer Anforderungen und deren Repräsentation
Vorgehen
Schritt 1

- Ermittlung des Arbeitsablaufs/ kritischer Ausführungsbedingungen
- Heranziehen der Horden zum Sortieren: Griffentfernung und -höhe beim Heranziehen einer zu prüfenden Horde
- Sortierarbeit am Tisch: Höhe Prüftisch und Handlungsstelle
- Seitliche Entnahme leerer Horden: Anfangs- und Endgriffhöhe zur Entnahme leerer Horden
- Stapeln von 3 Horden übereinander: Stapelendhöhe auf dem Tisch
- Einschichten von Horden in den Hordenwagen: Ausgangshöhe zum Ergreifen der Hordenstapel; kritische Fächerhöhen am Hordenwagen (tiefste, höchste Fächer, Einschubtiefe, Sichtbedingungen etc.)
Schritt 2
- Ermittlung geometrischer Verhältnisse und Randbedingungen des Arbeitsplatzes
- Bestimmung der Betriebsmittel, der Arbeitsplatzausrüstung und wesentlicher Abmaße
- Festlegung wichtiger Arbeits- und Handlungsstellen, Abstraktion auf wesentliche Mensch-Maschine-Schnittstellen; Festschreibung von Kontaktstellen
- Arbeitsstelle 1: Sortiertisch mit den Handlungsstellen 1 bis 6 (s. Bild oben)
- Arbeitsstelle 2: Hordenwagen zum Einstapeln der Horden mit den Handlungsstellen gemäß Hordenetagen
- Ermittlung der Hordenwagengeometrie und der Beladeart
- Hordenwagen mit 4 Etagen, pro Etage 8 Hordenstapel zu je 3 Horden
- Horden in 2 Reihen zu je 4 Hordenstapeln
- Beladung von der Längsseite
Schritt 3
- Erstellung eines vereinfachten 3D-Geometrie-Modells der Arbeitsplatzes
Schritt 4
- Simulation kritischer Ausführungsbedingungen, Ermittlung von Belastungsengpässen
Teilvorgänge
TV1: Heranziehen der Horden zum Sortieren
Schritt 0
- Festlegung einer kritischen Referenzperson i. S. worst case
- Für das Ergreifen der Horden finden im vorliegenden Fall kleine Personen die ungünstigsten Bedingungen vor. Zu erwarten ist, dass auch für andere Perzentilklassen ungeeignete Griffbedingungen in ungünstigen Körperhaltungen vorliegen. Zu prüfen ist mit dem Perzentil F5 i. S. worst case, ob die Horden überhaupt noch von der Handlungsstelle 5 aus erreichbar sind.
Schritt 1

- Vorbereitung der Szenepersonen für TV1
Detailschritte:
- Datei „Ausgang_Ist.max“ laden
- In der Datei befinden sich bereits 6 Referenzpersonen an den einzelnen Handlungsstellen: 3 x männlich M95-25 Jahre, 3x weiblich F5-55 Jahre (Datenbank DIN 33402). Personennamen gemäß Handlungsstelle: F5-55_am Tisch; xx_leere Horden; xx_Hordenstapel
- Löschen aller männlichen Personen und Anzeige verdecken für die „F5-leere Horden“ und „F5-Hordenstapel“ sowie erneutes Speichern der Datei „Ausgang_Ist F5_TV1.max“
- CharAT incl. Anhänge (Targets etc.) selektieren > BP > Anzeige > Funktion Verdecken: Rollout öffnen: Auswahl verdecken
- Datei „Ausgang_Ist.max“ laden
Schritt 2

- Einrichten der Extremitätentargets
Detailschritte:
- Umschaltung auf Handmitte
- F5 selektieren > BP ÄP > ControlD > RK Body: Left/Right Hand Contact: jeweils Hand Palm
- Umschaltung auf Handmitte
Schritt 3
- Einstellung der Körperhaltung
- Dazu sind zunächst die Handtargets zum Zielpunkt (Horde: Handlungsstelle 1: vordere Eckpunkte) zu führen, danach die Oberkörper- und Kopfhaltung einzustellen und eine Korrektur der Gesamtposition durchzuführen
Detailschritte:
- Selektion ulna_L/R_Targets aus Namensliste
- In Ansicht Seite (links/rechts) wechseln > Verschieben bis zu den Griffpunkten der Horde auf dem Tisch; in Ansicht oben horizontale Targetpositionen korrigieren
- Becken/Oberkörper beugen: da ein gestreckter Oberkörper bei Beugung über den vorderen Tisch zu erwarten ist, sollte hauptsächlich eine Beckenkippung vorgenommen werden:
- ControlD > RK Body: SRP Position/Orientation: y-Rotation auf einen Wert einstellen, bis die Hände die Zielpunkte erreichen
- evtl. Person insgesamt nahe an den Tisch verschieben: dazu CharAT+Targets (außer Handtargets!!) selektieren und horizontal verschieben
- Mittenaugenkamera einschalten: Sicht auf die Hände/Horde prüfen über Kamerakegel in Ansicht Seite > ggf. Kopfbewegung korrigieren
- RK Bone Animation: Index 90 Select: Animation Chanel: bei y-Rotation geeigneten Wert eintragen
- ggf. Beinstellung korrigieren: Tibia_Target geringfügig verschieben
- Speichern: "F5-55_TV1.max"




Schritt 4
- Diese Körperhaltung kann mit dem Haltungsbewertungsfilter nach NASA-Standard bewertet werden (s. Grundfunktionen)
- (A) Bewertung der Wirbelsäule mit dem Diskomfortsignal
- (B) Bewertung der Arme mit dem Posture-Signal
Detailschritte:
- Zu (A)
- ControlD > RK Posture Analysis: Outputfilter Diskomfort > Bodyregion Spine > Button Enable ==> Raster ==> Text
- Das eingeblendete Bewertungsfilter kann als Objekt in der Szene beliebig verschoben werden:
- aus Namensliste "_Agr Raster" zum Verschieben selektieren
- Bild erzeugen und Szene speichern: "F5-55-TV1-NASA WS.jpg" sowie "F5-55-TV1-NASA WS.max"
- Mesh erzeugen und speichern:
- "F5-55_Tisch" selektieren > ControlD > RK Body: Copy to Mesh ==> es entsteht ein 3dsmax-Objekt des Namens object01: dieses aus der Namensliste auswählen und umbenennen in "F5-55_TV1-Mesh"



- Zu (B)
- Filter umschalten auf Posture und Arms > entstandenes Objekt "_Agr-Raster" sinnvoll in der Szene verschieben
- analog zu (A) Bild der Arm-Bewertung erzeugen und Speichern: "F5-55-TV1-NASA Arm.jpg" sowie "F5-55-TV1-NASA Arm.max"
- Bewertungsfilter für "F5-55_Tisch" wieder ausschalten (alle entsprechende Button OFF)


Schritt 5:

- "F5-55-TV1-Mesh" separat speichern
- "Objekt F5-55-TV1_Mesh" selektieren > Speichern unter > Auswahl speichern unter "F5-55-TV1.max" speichern
- Mesh-Objekt aus der Szene löschen
TV2: Sortierarbeit am Tisch
Schritt 0
- Festlegung einer kritischen Referenzperson i. S. worst case
- Für die Sortierarbeiten finden im vorliegenden Fall große Personen die ungünstigsten Bedingungen vor.
- Für eine spätere Diskussion der Gestaltungsmaßnahmen ist entscheidend, ob nur Grenzperzentile von ungünstigen Arbeitsbedingungen betroffen sind oder ein Großteil der Nutzergruppe. Es sind demnach die Grenzperzentile zu ermitteln, für welche belastende Körperhaltungen beginnend auftreten.
Schritt 1
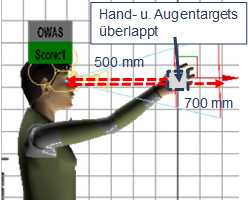
- Festlegung von Arbeitsanforderungen
- Mittlere Anforderungen an Motorik und Sicht ==> erforderlicher Sehabstand: >500 mm bis ca. 700 mm
Schritt 2
- Vorbereitung der Szene
- Öffnen der Datei "Ausgang_Ist.max"
- Löschen nicht benötigter Referenzpersonen, Speichern : "Ausgang_Ist_M95_TV2.max"
- Die Sortierarbeiten erfordern einen permanenten Sichtkontakt auf das Produkt im oben angegebenen Sehabstand. Auge, Kopf und Körper werden dabei nach Ausschöpfung komfortabler Bewegungslimits sequentiell eingesetzt.
- Zu prüfen ist, ob der Einsatz von Augen (komfortabel) und Kopf (zulässig) bereits einen Blickkontakt zum Sehobjekt zulässt oder ob der Rumpf nachgeführt werden muss. Die Bewegungsmotorik hängt zusätzlich vom Greifraum ab. Die worst case-Haltung ist zu bewerten.
Detailschritte:

- Augenkamera, serielle Auge-Kopf-Körpersteuerung, Handkontaktpunkte einrichten, Sehabstand einstellen, Bewegungslimits festlegen, Inverse Biomechanik aktivieren
- ControlD > RK Body: Handkontaktpunkte: Handmitte
- RK Visibility: Eye Attachments: Mittenaugen-Kamera ON; Steuertarget für die Auge-Kopf-Körpersteuerung einschalten: Eye Target: Define Default Target-Button
- Bewegungslimits einrichten: RK Visibility: Max.Limits-Schalter OFF ==> optimale Winkel voreinstellen: Get Opt.Data-Button
- Feineinstellung der Limits:
- Im ersten Schritt wird die Kopfbewegung auf einen zulässigen Winkelbereich (bei optimaler Blickzuwendung) festgelegt und der Rumpf fixiert
- In den Feldern für die Rumpfbewegung Werte=0 eintragen
- Die Data-Felder enthalten Empfehlungen für Winkellimits, an denen man sich orientieren kann ==> z. B. Kopfflexion: Eingabefeld Front 40° wählen > alle Eintragungen bestätigen mit Set Angles-Button
- Kameraparameter einrichten: Kamera selektieren > BP > ÄP > Parameter: Linse 50mm; Schnittebene Fernschnitt: 700 mm (= festgelegter Sehabstand)
- In der Szene werden nun der Eye-Steuertarget und die Hände in Richtung Sehobjekt bewegt. Erkennbar wird, dass das Sehobjekt außerhalb der festgelegten Sehentfernung liegt und die Hände noch keinen Kontakt herstellen können trotz verstärkter Kopfbewegung. Demnach wird eine Rumpfbewegung unerlässlich.
- inverse Biomechanik aktivieren: ControlD > RK Body: invers Biomechanic ON
- Augenkamera, serielle Auge-Kopf-Körpersteuerung, Handkontaktpunkte einrichten, Sehabstand einstellen, Bewegungslimits festlegen, Inverse Biomechanik aktivieren



Schritt 3
- Kontakt von Händen, Sehstrahl im erforderlichen Sehabstand zum Arbeitsgegenstand; Bewertung Körperhaltung
- Handtargets zum Sortierprodukt führen unter Kontrolle des einzuhaltenden Sehabstandes, ggf. Eye-Steuertarget korrigieren
- Die Bewertung der Körperhaltung kann mit dem OWAS-Verfahren durchgeführt werden, welches eine Gesamtkörperhaltung als Kombination der Körperteilhaltung von Armen, Beinen, Rumpf, Kopf betrachtet
- ControlD > RK Body: Body Graphics: Status ON > MonitorD > RK Dokumentation: Analysis Display ON sowie Display OWAS Status ON
- Zusätzlich können die momentanen Gelenkwinkel von Wirbelsäulenabschnitten in die Diskussion einbezogen werden.
- MonitorD > RK Bone: Torso Motion ==> Abschnitt Cervicale (Halswirbelsäule HWS) und Lumbale, Thoracale (Lenden- sowie Brustwirbelsäule LWS, BWS)
- Zwischenstand Speichern: "Ist_M95_TV2_OWAS.max"
- Unter Einhaltung der Sehentfernung erreicht M95 Griffkontakt an der Handlungsstelle, wenn die HWS im Komfort- und die restliche Wirbelsäule im zulässigen Bereich eingesetzt wird, d. h. bei komfortabler Kopf- und belastender Rumpfbewegung. Die Bewertung ergibt eine Gesamtbelastung der Körperhaltung nach Ampelfarbe gelb.



Alternative Verfahrensweise im Schritt 3:
- Die Bewegungen von Augen, Kopf werden von vornherein auf Komfortwinkelwerte voreingestellt.
- Für die Beweglichkeit des Rumpfes werden größere Winkelbereiche zugelassen, da eine Rumpfbewegung im vorliegenden Fall zu erwarten ist.
- Zunächst wird der Rumpf fixiert und danach in die Bewegung mit einbezogen.
- Auch so erfolgt dann eine Simulation der Gesamthaltung gemäß Arbeitsplatzsituation. Die Körperhaltungsbewertung kann ebenso über OWAS vorgenommen werden.
Detailschritte zur alternativen Verfahrensweise Schritt 3:
- ControlD > RK Visibility: Mittenaugenkamera ON; Eye Target ON
- Limits für Auge-Kopf-Körpermotorik festlegen: MaxLimits OFF; in den Feldern für Augen-, Kopfbewegung optimale Werte eintragen; Rumpf: zulässige Werte festlegen;
- Torso Fixation ON > Button Set Angles (dadurch wird der MaxLimit-Schalter automatisch wieder ON gesetzt, mit den neu festgelegten Limitwerten)
- Erkennbar wird auch hier, dass bei fixiertem Torso weder Hände noch Sehstrahl Kontakt zur Handlungsstelle herstellen können und demnach der Oberkörper in die Bewegung einbezogen werden muss.
- Torso Fixation OFF > erneutes Set Angles
- Eye Target soweit vertikal und horizontal bewegen, bis die Begrenzung des Kamerakegels (= Sehentfernung) auf Höhe der Handlungsstelle zu liegen kommt
- Handtargets zur Handlungsstelle führen
- OWAS-Bewertung eingeschalten lassen > Kontrolle der Bewegungswinkel im MonitorD > RK Bone



- Alternativ kann auch der Eye-Target nur bis zur Handlungsstelle geführt werden:
- Dadurch wird im vorliegenden Fall noch keine Kontakt der Hände zur Handlungsstelle möglich und die Sehentfernung ist zu groß, da M95 noch zu wenig gebeugt steht.
- Die fehlende Beugung kann über den Bone Index 89 ergänzt werden, der Lenden- und Brust-Wirbelsäule zusammen steuert
- Eye-Target und Hand-Targets bis zur Handlungsstelle führen > ControlD RK Bone Animation: Index 89 Select > Animation Chanel ==> y-Rotation: Wert erhöhen, bis der Kamerakegelrand an der Handlungsstelle liegt
- OWAS-Bewertung eingeschalten lassen

Schritt 4
- Bewertung des TV2 für andere Perzentilklassen
- Betrachtung zunächst der Referenzpersonen F5 und F50 (entspricht M5).
Detailschritte:
- Laden der Datei "Ist_M95_TV2_OWAS.max"
 ACHTUNG: Beim Laden der Datei geht die Einstellung der OWAS-Bewertung verloren, der OWAS-Schalter ist OFF gesetzt.
ACHTUNG: Beim Laden der Datei geht die Einstellung der OWAS-Bewertung verloren, der OWAS-Schalter ist OFF gesetzt.- Im MonitorD > RK Documentation Button Display OWAS Status erneut ON setzen.
- Targets eingeschalten lassen; Umschaltung auf F5
- ControlD > RK Type Select > Body Type Feminin > Age 55 > Percentil 5 > Generate
- Person umbenennen in "F5_55_am Tisch" (RK Body, ContrilD)
- Die Extremitätentargets behalten bzw. verlieren durch den Typwechsel den Kontakt zu Targetpositionen der Vorgängerperson. Die Hände sollen an der Handlungsstelle verbleiben, F5 selbst ist nun soweit zu verschieben, dass die Füße Bodenkontakt erhalten
- Auswahl: F5_am Tisch; F5_am Tisch_SRP-Target 00> Translation; ggf. sind die Fußtargets nochmals zu korrigieren.
- ACHTUNG: Beim Umschalten auf ein anderes Geschlecht bleiben zwar die Targets, so auch der Augentarget erhalten, jedoch gehen alle Einstellungen der RK Visibility verloren. Diese bleiben nur erhalten, wenn die Referenzperson innerhalb eines Geschlechts gewechselt wird.
- Daher sind diese Parameter nun einzurichten.
- Einstellungen in der RK Visibility: Mittenaugenkamera ON; MaxLimit-Schalter OFF; Button GetOptimaData betätigen; Head-Limit: frontal: 25°; Torso-Limit: frontal: 40°; zunächst Torso Fixation: ON; Set Angles ON: man sieht, dass F5 gebeugt steht, um die Handlungsstelle mit den Händen zu erreichen
- wird die inverse Biomechanik deaktiviert, kann geprüft werden, ob die Handlungsstelle mit Händen und Sehstrahl kontaktiert werden kann: in RK Body Invers Biomechanic OFF ==> Init Spine: zu erkennen ist, dass die Handlungsstelle nur mit gestreckten Armen erreichbar ist und ohne Rumpfbewegung nicht eingesehen werden kann
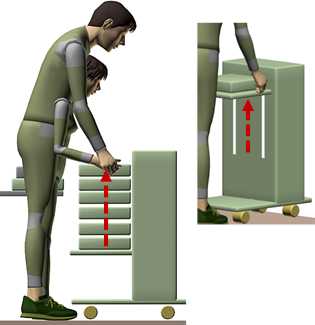
- wird nun in der RK Visibility der Schalter Torso Fixation OFF gesetzt (danach Set Angles), entsteht die gleiche ungünstige Körperhaltung (Rumpf leicht gebeugt) wie im Bild oben
- Zu erkennen ist insgesamt, dass die OWAS-Bewertung für kleine Frauen (wie bei Referenzperson M95) die Ampelfarbe gelb beibehält, was an der ungünstigen Erreichbarkeit der Handlungsstelle liegt.
- Eine weitere Prüfung für die Referenzperson F50 und weitere kann entfallen, da die Ausführungsbedingungen für größere Personen ungünstiger werden.
- Laden der Datei "Ist_M95_TV2_OWAS.max"


TV3: Entnahme leerer Horden
Schritt 0
- Festlegung einer kritischen Referenzperson i. S. worst case
- Leere Horden werden in unterschiedlichen Griffhöhen entnommen. Der Zugang zur tiefsten Stapelposition führt im vorliegenden Fall für alle Personen zu einer Rumpfbeugung, große Personen haben dabei ungünstigste Ausführungsbedingungen. Für die oberste Stapelposition ist zu prüfen, ab welchem Grenzperzentil eine risikobehaftete Körperhaltung auftritt.
Detailschritte:
- Öffnen der Datei "Ausgang_Ist.max"
- Löschen nicht benötigter Referenzpersonen, Speichern "Ausgang_Ist_M95_TV3.max"
- In der Datei ist die inverse Biomechanik für die Referenzperson bereits aktiviert.
Schritt 1


- Vorbereitung der Szene
Detailschritte:
- Die ungünstigste Körperhaltung ergibt sich beim Ergreifen der untersten Horde. Alle darüber liegenden Horden sind in der Szene auszublenden.
- Horden aus Namensliste selektieren (Horden leer…) > ÄP: Palette Anzeige > Verdecken: Auswahl verdecken
- Handkontaktpunkte einrichten und Hände in Greifhandstellung
- ControlD > RK Body: Handkontaktpunkte: Handmitte > RK Postr./Collis.: Handform: 5-Finger-Greifhand
- Opazität der Materialfarbe auf 100% setzen
- Materialeditor in der HSL öffnen > zugehörige Farbkugel markieren > Rollout Blinn-Grundparameter öffnen > Opazität auf 100% setzen
- Die ungünstigste Körperhaltung ergibt sich beim Ergreifen der untersten Horde. Alle darüber liegenden Horden sind in der Szene auszublenden.
Schritt 2

- Körperbewegung durchführen, bestmöglich gemäß Ist-Zustand optimieren und bewerten
- Bevor die Körperhaltung verfeinert wird, ist in der Registerkarte Dokumentation des Monitor-Dialogs die Körperhaltungsbewertung zu aktivieren. Hier soll das RULA-Verfahren gewählt werden, welches vorausgewählte Einzelkörperhaltungen bewertet.
- Beide Handtargets sind aus der Namensliste zu wählen und in Seitenansicht bis zur Griffstelle der leeren Horde zu führen. Momentan beugt sich M95 mit gestreckten Beinen und kann dadurch die Griffstellen nicht erreichen: die Körperhaltung ist noch anzupassen
- Die Bewegung erfolgt sehr wahrscheinlich mit gebeugten Beinen und zur Aufrechterhaltung der Standsicherheit führt das Becken entsprechende Ausgleichsbewegungen aus. Der Körperschwerpunkt ist bei einer weiteren Haltungsanpassung zu kontrollieren und sollte immer über der Fußfläche liegen
Detailschritte:
- Einschaltung Schwerpunkt:
- controlD > RK Bone Struct: Index 0 selektieren > Bone Attachments: CG (Center of Gravity) ON
- Dadurch wird der Schwerpunkt als Marker eingeblendet, dessen Position von der aktuellen Körperhaltung abhängt. Nun kann die Körperhaltung bestmöglich optimiert werden, indem das Steuertarget für das Becken lageverändert wird. Zusätzlich ist die Wirbelsäulenbeugung anzupassen, indem die Steuerbones für LWS+BWS (Index 89) sowie für HWS (Index 90) in der y-Rotation zu beeinflussen sind. Optional können die Fußstellungen angepasst werden.
- Becken über …SRP_Target von M95 selektieren und Translationen ausführen
- RK Bone Animation des ControlD: Index 89 bzw. 90 auswählen
- Animation Chanel: ==> y-Rotation: geeigneten Wert eintragen
- Fuß selektieren und Flexion/Extension anpassen
- RK Bone Animation des ControlD: Index 73/78 (Calcaneus links, rechts) auswählen
- Animation Chanel: ==> y-Rotation: geeigneten Wert eintragen
- Einschaltung Schwerpunkt:



Schritt 3
- Prüfung der Körperhaltung bei Entnahme der obersten Horde für die kleinste Person der Nutzergruppe (F5)
Detailschritte:
- Datei "Ausgang_Ist.max" laden
- alle Referenzpersonen bis auf die F5 am leeren Hordenstapel löschen, Material-Opazität verändern
- Handtargets der Person auswählen und zur oberen Horde an die Kontaktstellen führen
- Handstellung verbessern
- RK Bone Animation > Select Index 36/55 (Carpale L/R) > Animation Chanel: ==> z- und x-Rotation geeigneten Wert eintragen
- zu erkennen ist, dass sich die kleine Frau zum Ergreifen der obersten Horde bereits auch beugen muss, daher entfällt die Prüfung weiterer Referenzpersonen
TV4: Stapeln von 3 Horden übereinander
Schritt 0
- Festlegung einer kritischen Referenzperson i. S. worst case
- Die unterste Horde wird an die linke Seite des Tisches geschoben. Die Griffhöhe entspricht der Arbeitshöhe des TV 2. Die höchste Stapelposition, das Aufsetzen der 3. Horde stellt im vorliegenden Fall für große Personen die ungünstigsten Bedingungen dar, da diese sich u. U. zu den Kontaktpunkten beugen müssen. Darüber hinaus ist zu prüfen, ob sich die Horde für kleine Personen in einer optimalen Arbeitshöhe befindet.
Detailschritte:
- Öffnen der Datei "Ausgang_Ist.max"
- Löschen nicht benötigter Referenzpersonen
- In der Datei ist die inverse Biomechanik für die Referenzperson bereits aktiviert.
- Speichern: "Ausgang_Ist_M95_TV4.max"
Schritt 1

- Vorplanung der Ausgangshaltung, Griffbedingungen und des Vorgehens der Haltungsanpassung
- Die Referenzperson „M95_Hordenstapel“ steht momentan diagonal vor dem Hordenstapel (6). Es ist eher zu erwarten, dass die Person sich von der Haupthandlungsstelle (5) aus über Körperdrehung dem Stapelort zuwendet und dazu einen seitlichen Schritt ausführt. Diese Ausgangshaltung und -stellung der Person ist zu modifizieren.
- Die Horden werden am Rand mittig gegriffen.
- Zunächst werden die Hände der Person in der momentanen Ausgangsstellung zu den Griffstellen geführt. Eine ggf. erforderliche Beugung wird durch die eingeschaltete inverse Biomechanik automatisch in Gang gesetzt.
- Danach wird die Person frontal zur Haupthandlungsstelle (5) ausgerichtet (entspricht Ausgangsstellung) sowie die Rumpfdrehung für die Zuwendung des Körpers zur Handlungsstelle 6 beim Ablegen der 3.Horde soweit wie erforderlich ausgeführt.
Schritt 2
- Vorbereitung der Szene
- Handkontaktpunkte einrichten: Handmitte; Hände in Greifhandstellung Handform: 5-Finger-Greifhand
- Opazität des Materials der Referenzperson auf 100% setzen
Schritt 3

- Haltungsanpassung
Detailschritte:
- die Handtargets (_ulna_L/R_Targets) aus der Namensliste der HSL nacheinander selektieren und an die Kontaktstellen der Horde führen
- frontale Ausgangsstellung herstellen
- "M95_Hordenstapel" auswählen
- BP > ÄP > ControlD > RK Body: im Feld SRP Position/Orientation ==> z-Rotation: geeigneten Wert eintragen
- Rumpftorsion sowie Kopfhaltung einstellen
- RK Bone Animation > Index 89 selektieren > Animation Chanel: ==> y-Rotation: geeigneten Wert eintragen
- Index 90 selektieren: ==> y-Rotation: geeigneten Wert für die Flexion eintragen
Schritt 4
- Haltungsbewertung
Detailschritte:
- ControlD > RK Body > im Feld Body Graphics Status ON > MonitorD > RK Documentation > Display OWAS Status ON


Schritt 5
- Überprüfung der Arbeitshöhe für Frauen: Ermittlung kritischer Grenzperzentile für die Arbeitssituation (F5/F50..)
Detailschritte:
- in der letzten Datei zur Haltungsanpassung der Person M95 Typwechsel vornehmen: Wechsel auf F5-55 Jahre
- Referenzperson umbenennen, OWAS-Bewertung einschalten
- F5 und SRP-Target verschieben, bis die Füße der Frau Bodenkontakt erhalten, ggf. Fußstellung korrigieren
- Es ist ersichtlich, dass die Arbeitshöhe für die kleine Frau i. O. ist
- nacheinander Umschaltung auf F50 (=M5), F95 (=M50); Schrittfolge wie s.o. und erneute Prüfung

TV5: Einstapeln der Horden in den Hordenwagen
Schritt 0
- Festlegung einer kritischen Referenzperson i. S. worst case
- Der Hordenwagen umfasst 4 Böden, die von vorn befüllt werden. Die oberste Etage weist für die kleine und die unterste Etage für die große Person kritische Griffpositionen auf.
- Für die Betrachtung der Körperhaltungen ist die Ausrichtung des Hordenwagens unerheblich, die Beladeseite wird hier ignoriert.
- Belastungen durch Lastenhandhabung werden nicht mit dem Menschmodell bewertet, sind also separat mit konventionellen Verfahren zu untersuchen.
Detailschritte:
- Öffnen der Datei "Ausgang_Ist.max"
- Löschen der Referenzpersonen: „_am Tisch“ und „_Hordenstapel“
- Umbenennen der verbleibenden Personen in „_Hordenwagen“. (s. Tutorials: Grundfunktionen). Für diese Personen ist die inverse Biomechanik bereits aktiviert.
- Verdecken nicht benötigter Szeneobjekte
- Speichern: "Ausgang_Ist_RP_TV5.max"
Schritt 1
- Vorbereitung der Szene
- Handkontaktpunkte für beide Referenzpersonen einrichten: Handmitte; Hände in Greifhandstellung Handform: neutral
- Opazität des Materials der Referenzpersonen auf 100% setzen
- Festlegung der Kontaktstellen am Hordenstapel: der Stapel wird an den Seiten mittig untergriffen.
- Die Kontaktstellen können optional mit Dummy-Objekten markiert werden.
Detailschritte:

- Dummy-Objekt erzeugen und in der Szene platzieren
- BP > EP > Funktion Helfer > Objekttyp Dummy > Erstellen beliebiger Größe durch Ziehen in der Szene
- Umbenennen des Dummys in "Kontaktpkt_links"
- über gleichzeitiges Drücken von Hoch- und linke Maustaste Kopie des Dummys erstellen und umbenennen in "Kontaktpkt_rechts"
- Objektgruppe "Horden im Wagen" in der Szene frei platzieren
- Dummys an den Griffstellen des Hordenstapels platzieren
- Fangpunkt Mittelpunkt einrichten und Fangfunktion nutzen: > HSL > Werkzeug Objektfang ein/aus: im Kontextmenü Objektfang Mittelpunkt und Drehpunkt ON, alle anderen OFF
- Dummy-Objekt im Fangpunkt einrasten lassen
- Dummys mit dem Hordenstapel verknüpfen
- Kontaktpkt_links selektieren > HSL: Werkzeug Auswahl und verknüpfen > aus der Namensliste Objektgruppe "Horden im Wagen" auswählen > Button Verknüpfen > Verknüpfen-Funktion beenden über HSL: Objekt auswählen
- Dummy-Objekt erzeugen und in der Szene platzieren


- Referenzpersonen an die Handlungsstelle bringen
Detailschritte:

- Referenzpersonen vor den Hordenwagen verschieben und drehen (im Weltkoordinatensystem: Rotation um z, Translation um x, y)
- beide Referenzpersonen gleichzeitig aus Namensliste der HSL auswählen
- in der HSL mit Kontextmenü die Werkzeuge Auswahl und Verschieben, danach Auswahl und Rotation öffnen > Transformationen als Abstand: Welt eingeben
- Referenzpersonen vor den Hordenwagen verschieben und drehen (im Weltkoordinatensystem: Rotation um z, Translation um x, y)
- Hordenstapel in oberster Etage platzieren
- Der Hordenstapel wird in der Szene über die Transformationsfunktion so in die 1. Etage verschoben, dass seine Kontaktpunkte durch die Referenzpersonen noch gegriffen werden könnten
Schritt 2
- Haltung der kleinen Person für das Befüllen der oberen Etage des Wagens anpassen
Detailschritte:
- Handtargets der kleinen Person an die Kontaktpunkte des Hordenstapels führen: das kann auch über die Fangfunktion erfolgen (Fangpunkt: Drehpunkt)
- Es ist u. U. eine Korrektur von Griffentfernungen und Kollisionen der F5 erforderlich
- für eine Verschiebung der Person sollen die Hände am Objekt Kontakt halten, daher sind Handtargets für eine Translation nicht mit auszuwählen
- die Oberkörperhaltung kann über eine y-Rotation des Steuerbones der Wirbelsäule (Index 89) verändert werden



Schritt 3
- Haltung der kleinen Person bewerten mit OWAS-Verfahren: Gesamtkörperhaltung
Schritt 4

- Haltung der großen Person für das Befüllen der unteren Etage des Wagens anpassen
Detailschritte:
- kleine Person verdecken, große Person einblenden
- Handtargets der kleinen Person an die Kontaktpunkte des Hordenstapels führen
- optional können die Handtargets mit dem Hordenstapel verknüpft werden (nicht umgekehrt)
- durch die Verknüpfung folgen die Hände der Bewegung des Hordenstapels, werden demnach automatisch mitgeführt. Durch diese Verknüpfungsreihenfolge bleibt die Hand trotzdem für Feinanpassungen separat beweglich.
- Körperschwerpunkt einschalten (s. analog zu TV3, Schritt 2)
- Planung der Haltungsanpassung
- Die Haltung wird sich aus Bewegungsanteilen von Wirbelsäule und Becken zusammensetzen, die Beine werden für die Beugung im Knie einen größeren Öffnungswinkel aufweisen
- Haltungseinstellung und -Anpassung analog zu TV3, Schritt 3
- Haltungsbewertung analog zu Schritt 3
Zusammenfassung der Gestaltungsmängel

Ableitung von Gestaltungsanforderungen
Arbeitshöhe an der Handlungsstelle 5
- Ergonomische Anforderungen
- Handkontakt: Kontaktstelle am zu prüfenden Produkt (s. Abmessungen an der Handlungsstelle)
- aufrechter Rumpf
- gemäß DIN EN 1005-4 Rumpfneigung vorwärts bei statischer und dynamischer Bewegung 0° bis max. 20°
- Festlegung: anstreben: Flexion bis max. 10°
- Armhaltung gemäß empfohlener Winkelbereiche der DIN EN 1005-4
- Oberarmhaltung in Bezug zum Rumpf bis max. 20° für statische und dynamische Haltungen
- Handhöhe unterhalb von Herzhöhe
Alternativen zur Anpassung der Arbeitshöhe:
- Alternative 1: geeignete feste Arbeitshöhe für alle Referenzpersonen
- Alternative 2: verstellbare Arbeitshöhe im Bereich der Grenzperzentile
Alternative 1: Überprüfung der Eignung einer festen Arbeitshöhe
Methodisches Vorgehen:
Mithilfe der Funktion Aug-Kopf-Körper-Motorik wird der Augensteuertarget mit den Handtargets in Deckungsgleichheit gebracht und beide Targets zusammen so positioniert, dass die ergonomischen Anforderungen bestmöglich erfüllt werden. Der Kegel der Augenkamera wird auf den minimal bis maximal festgelegten Sehabstand eingestellt. Damit soll erreicht werden, dass der Sehstrahl ungefähr in Sehabstandlänge auf die Hände gerichtet ist. Dazu sind optimale Limitwerte für Auge - Kopf - Körper einzurichten und während der Bewegungsausführung der Handtargets der Ober- und Unterarmwinkel zu kontrollieren. Der Ort der Hände, der alle Bedingungen erfüllt, kennzeichnet die Lage der Handlungsstelle.
Schritt 0
- Vorbereitung der Referenzpersonen
Detailschritte:
- Öffnen der Datei "Ausgang_Ist.max"
- Löschen aller Referenzpersonen bis auf „_am Tisch“
- alle erforderlichen Sichtparameter einstellen
- Mittenaugenkamera OFF
- Bewegungslimits für Auge-Kopf-Körper-Motorik auf optimale Daten setzen (Button Get optim. Data: Modifikation: Kopfflexion: 25°; Rumpfflexion: 10°) ==> alle Werte setzen (Set Angles)
- Kamera-Fernschnittebene: 700 mm; Kamera-Nahschnittebene: 500 mm
- Kameralinse: 50 mm (entspricht ca. Blickfeld)
- Schalter invers Biomechanik zunächst OFF
- Handkontaktpunkte: Handmitte
- Augentarget mit Handtargets in Deckungsgleichheit bringen
- Körperhaltungsbewertungsfilter OWAS: ON
- Anzeige des aktuellen Oberarmwinkels
- ControlD > RK Bone Animation > Index 53 (Humerus) > Select > MonitorD > RK Bone

Schritt 1
- Ermittlung einer ergonomischen Handhöhe (M95)
Detailschritte:
- ocula_M-Target und ulna R/L_Targets in eine optimale Arbeitshöhe verschieben, dabei Kontrolle:
- OWAS-Filter permanent Ampelfarbe grün
- Oberarmwinkel nicht wesentlich über 20°
- Targets (Hände, Auge) im Sehentfernungsbereich und innerhalb des Kamerakegels
- Speichern als "AH_V1_M95 gestreckt.max"
- Die Position der Hände entspricht der Arbeitshöhe (Bild 1)
- ocula_M-Target und ulna R/L_Targets in eine optimale Arbeitshöhe verschieben, dabei Kontrolle:
Schritt 2
- Überprüfung der Arbeitshöhe für eine gelockerte stehende Körperhaltung (M95)
Detailschritte:
- Invers Biomechanic ON setzen
- im Beispiel ändert sich die OWAS-Ampelfarbe auf gelb (Bild 2): ==> die Handposition sollte geringfügig modifiziert werden: ==> synchrone Bewegung des Steuertargets für Augen-Kopf-Körper und der Handtargets, bis eine grüne Ampelfarbe erzielt ist (Bild 3)
- in dieser Körperposition Invers Biomechanic wieder OFF schalten und danach Handposition ggf. optimieren (Bild 4)
- Speichern als "AH_V1_M95 locker.max"
- Invers Biomechanic ON setzen

Schritt 3

- Überprüfung der Arbeitshöhe für eine gestreckte und gelockerte stehende Körperhaltung (F5)
Detailschritte:
- da in Alternative 1 eine feste Arbeitshöhe angestrebt wird, sind Augen- und Handtargets auf die Position des M95 zu verschieben
- der Invers Biomechanic-Schalter ist ON und OFF zu setzen und die Haltungen zu vergleichen
- Speichern als "AH_V1_F5 gestreckt.max"
- Speichern als "AH_V1_F5 gestreckt.max"
- da in Alternative 1 eine feste Arbeitshöhe angestrebt wird, sind Augen- und Handtargets auf die Position des M95 zu verschieben

Schritt 4
- Wertung der Lösung
- Die große Referenzperson weist eine ergonomisch vertretbare Arbeitshaltung auf.
- Jedoch ergeben sich Einschränkungen für die kleine Frau F5:
- Hände nahezu in Brusthöhe
- Sehabstand < 500 mm, für die lockere Körperhaltung << 500 mm
- Da die lockere Körperhaltung realistischer auftritt, ergeben sich bei fester Arbeitshöhe ungünstige Ausführungsbedingungen für kleine Nutzer.
Alternative 2 ==> variable Arbeitshöhe ist anzustreben.
Alternative 2: Ermittlung einer variablen Arbeitshöhe
Schritt 0

- Festlegung der Arbeitshöhe für M95
- Die Arbeitshöhe entspricht der in Alternative 1 festgelegten Höhe (s. Datei "AH_V1_M95 locker.max"
Schritt 1
- Festlegung der Arbeitshöhe für F5
Detailschritte:
- Ausgangspunkt ist die Datei "AH_V1_F5 locker.max"
- Hand- und Augensteuertargets in eine analoge Armhaltung wie beim M95 bringen: unter Kontrolle von Sehentfernung, Oberarmwinkel und der Ampelfarbe von OWAS
- Speichern: "AH_V2_vario.max"
- Ausgangspunkt ist die Datei "AH_V1_F5 locker.max"
- Die Arbeitshöhe ist insgesamt stufenlos höhenverstellbar auszulegen
- Denkbar ist auch eine gestufte Verstellbarkeit, die Stufung richtet sich nach den einzelnen Arbeitshöhen der verschiedenen Perzentilklassen (wird hier nicht betrachtet)
Griffhöhe und -entfernung an der Handlungsstelle 1
- Ergonomische Anforderungen
- Beachtung des Greifraums der kleinsten Person der Nutzergruppe: Horden möglichst am Rand des Greifraums platzieren
- Bewegungsausführung mit geringer Rumpfbeugung: Rumpfflexion max. 20° (s. Anforderungen DIN EN 1005-4)
- Weitere Aspekte und konzeptionelle Auslegungsvarianten werden in der Übung diskutiert.
Schritt 0
- Festlegung der maximalen Griffentfernung unter der Annahme: Streckung der Arme unter Einbeziehung des Oberkörpers bis zur noch als optimal angesehenen Rumpfflexion
Detailschritte:

- Datei "AH_V2_vario.max" laden
- M95 mit Anhängen verdecken, OWAS-Bewertung OFF schalten
- Greifraum für F5 einschalten
- ControlD > RK Body > Body Graphics: Reach R ON
- ggf. Opazität der Materialfarbe des Greifraums verändern: ==> Materialeditor (s. dazu separates Anleitungsmaterial Übung LV Digitale Menschmodelle)
- Schalter Invers Biomechanic ON (damit werden Extremitäten und Oberkörper bis zum Hüftpunkt in die Bewegung einbezogen)
- zur Kontrolle der Rumpfflexion wird der Winkel zwischen Torsovektor (Verbindung Hüftpunkt - HWS-C1) und Senkrechten überprüft
- MonitorD > RK Bone öffnen: ==> Feld Torso vector
- Bewegung der Hände von F5 bis zur zulässigen Bewegungsgrenze der Rumpfflexion (Kontrolle des Torsovektors, s. o.)
- der eingeblendete Greifraum folgt der Bewegung, erweitert sich also um die Rumpfbewegung, dadurch wird die Grenze der Griffzone bereits festgeschrieben
- optional kann noch die Grenze der Handmitte markiert werden
- Invers Biomechanic-Schalter OFF setzen (damit wird die aktuelle Oberkörperhaltung eingefroren; in eine weitere Bewegung über die Handtargets werden nur noch die oberen Extremitäten einbezogen)
- Handtargets soweit bewegen, bis eine nahezu gestreckte Armhaltung entsteht
- Die Prüfhorden sind demnach bis zu dieser gefundenen Greifraumgrenze für große und kleine Nutzer heranzuführen.
Schritt 1

- Festlegung der Griffhöhe für die Zuführung der Prüfhorden
- Die Griffhöhe richtet sich nach der Arbeitshöhe für die Grenzperzentile, s. Punkt 1.9.1, Alternative 1. Die Zuführung der Prüfhorden kann nun über verschiedene technische Lösungen umgesetzt werden, das richtet sich nach verschiedenen technologischen Randbedingungen vorgelagerter Prozesse, nach Pufferzonen etc. Das wird in der Übung diskutiert.
- Hier sollen lediglich ergonomische Anforderungen festgelegt werden.
- Datei "AH_V2_vario.max" laden
- Einblenden der großen Person M95 und der Tischhöhe für dieses Perzentil
- Kopie der Prüfhorde erstellen und in gleicher Entfernung wie für F5 in Arbeitshöhe des M95 platzieren
- Handtargets des M95 an die Prüfhorde führen
- Speichern der Lösungsdatei als "Soll_Zuführung Prüfhorde_Hst1.max"
- Denkbar ist eine Rollenbahn mit Antrieb, die durch den Beschäftigten in Gang gesetzt wird. Ein Segment ist dabei schwenkbar gelagert und kann an die unterschiedliche Arbeitshöhe angepasst werden.
Entnahmehöhe an der Handlungsstelle 2
- Ergonomische Anforderungen

- Die Entnahme leerer Horden an Handlungsstelle 2 umfasst sinngemäße ergonomische Anforderungen wie in Punkt 1.9.2. beschrieben: eine Entnahme der Horden in möglichst aufrechter Körperhaltung für alle Nutzer bei maximal bis zu 20° Rumpfbeugung.
- Die Ableitung der Handgriffhöhen, getrennt nach den Grenzperzentilen M95 und F5 erfolgt demnach analog zum Vorgehen in 1.9.2.
- Datei "Ausgang_Ist.max" öffnen, überflüssige Referenzpersonen löschen; Referenzpersonen an den leeren Horden in der Datei belassen; Materialien ändern, Handkontaktpunkte einrichten
- Handtargets des Grenzperzentils M95 nach unten führen, bis die Arme nahezu gestreckt und der Rumpf maximal bis 20° leicht vorgeneigt ist.
- End- und Ausgangshöhe des Hordenstapels markieren
- Die festzulegende Entnahmehöhe richtet sich nach der Handposition der größten Person.
- die Handtargets der kleinen Person F5 mit denen des M95 in örtliche Übereinstimmung bringen
- Die niedrigste Stapelposition ergibt sich durch die Stapelhöhe und Anzahl zu stapelnder Horden.
- Diskussion möglicher Gestaltungslösungen
- Speichern der Lösungsdatei als "Soll_AH_Hordenstapler_Hst2.max"
- Z. B. ist denkbar, eine höhennivellierte Lagerung der Horden auf einer Stapelbühne vorzusehen. Die Horden werden auf einer gleich bleibenden Entnahmehöhe bereitgestellt.
Arbeitshöhe an der Handlungsstelle 6
- Ergonomische Anforderungen
- An Handlungsstelle 6 werden 3 Horden übereinander gestapelt und der Hordenstapel für das Einschichten in den Hordenwagen untergriffen.
- Das Untergreifen des Stapels erfolgt etwa in Tischhöhe und damit knapp unterhalb der Arbeitshöhe von Handlungsstelle 5.
- Das Ergreifen der Last sollte in aufrechter Körperhaltung möglich sein.
- Das Stapeln der 3. Lage sollte unterhalb der Schulterhöhe erfolgen.
Durch Anpassung der Arbeitshöhe an Handlungsstelle 5 werden die ergonomischen Anforderungen erfüllt.
- Nachweis für das Ergreifen der Horden auf Tischhöhe:
- Ausgangsdatei "AH_V2_vario.max" laden
- Hordenstapel für M95 und F5 jeweils auf die geänderte Arbeitshöhe schieben
- Hände beider Referenzpersonen in der Seitenansicht jeweils auf Höhe der Entnahmestelle bringen
- beide Personen in der Hinten-Ansicht frontal vor den Hordenstapel schieben; Hände ggf. nochmals seitlich anpassen
- OWAS-Bewertung aktivieren
- Speichern der Lösungsdatei als "Soll_AH_ Hordenstapel nehmen_Hst6.max"
- Nachweis für das Stapeln der obersten 3.Horde:
- Hordenstapel für M95 und F5 jeweils auf die geänderte Arbeitshöhe schieben
- Anpassung von Händen und Oberkörper (leicht gedreht) gemäß der Schrittfolge zu Teilvorgang 4 (TV4)
- Speichern der Lösungsdatei als Soll_AH Horde 3 stapeln_Hst6.max"

Verstellbereich des Hordenwagens zur Anpassung des Beladefläche an die Arbeitshöhe
Da die Lastmasse des Hordenstapels > 3kg beträgt, liegt manuelle Lastenhandhabung vor. Ergonomische Anforderungen an die Lastmasse, Häufigkeit der Ausführung etc. sind separat zu betrachten, s. auch TV5
- Ergonomische Anforderungen für die geometrischen Bedingungen am Arbeitsplatz
- aufrechte Rumpfhaltung, nicht verdreht: ==> möglichst maximal nur bis 20° Rumpfflexion, bis 10° Rumpftorsion
- gemäß DIN EN 1005-2:
- horizontaler Abstand zwischen Fuß- und Handmitte körpernah: ≤ 25 cm
- Hubdistanz ≤ 25 cm
- Heben zwischen Hüft- und Schulterhöhe
- Vermeidung des Tragens der Last; Trageentfernung < 2 m
- gute Zugänglichkeit am Handhabungsort; beidhändige Handhabung
Varianten zur Anpassung der Hordenetagenhöhe an die Arbeitshöhe:
- Variante 1: kontinuierliche Höhenanpassung des Wagens
- Platzierung des Wagens direkt neben dem Arbeitstisch
- Höhenanpassung durch hydraulische/ elektrohydraulische Hubgeräte entsprechender Traglast (Stapler, Vertikalförderer etc.)
- Bedienung der Geräte mit Fuß- oder Handstellteilen
- teilweises Einschieben der Hordenstapel in handlungsstellennahe Etagen
- manuelles Beschicken in aufrechter Körperhaltung körpernah
- Variante 2: gestufte Höhenanpassung des Wagens
- arbeitsstellennahe Platzierung des Wagens für manuelle Beschickung
- Stufung in minimal erforderlichen Schritten zur Anpassung an die Grenzperzentile
- Höhenanpassung unter Beachtung der ergonomischen Mindestanforderungen
Weitere Lösungswege werden in der Übung diskutiert.
Variante 1: Kontinuierliche Höhenanpassung des Wagens
Schritt 0
- Vorbereitung der Szene
- (1) Der erforderliche Verstellbereich des Wagens, d. h. die oberste Wagenposition ergibt sich durch Handhöhe der großen Referenzperson.
- (2) Die Erreichbarkeit der oberen entferntesten Wagenetagen von Handlungsstelle 6 aus ist am kritischsten für die kleine Referenzperson. Für Variante 1 ist zu prüfen, ob diese seitliche Beschickung direkt neben dem Arbeitstisch vorteilig ist. Diese Prüfung (2) hat Vorrang und entscheidet über Variante 1.
Detailschritte:

- Öffnen der Datei "AH_V2_vario.max"
- Hordenwagen mit der Längsseite direkt an Handlungsstelle 6 platzieren
- M95 mit zugehörigem Tisch und seinen Arbeitsplatzelementen ausblenden
- F5, Tisch, Hordenstapel einblenden
- F5 zunächst gerade ausrichten und Verknüpfung der Hände mit dem Hordenstapel
- ControlD > RK Body > Init Spine
- Handtargets, Augentarget sowie Hordenstapel frontal in mittlerem Abstand zum Oberkörper verschieben
- Verknüpfung der Handtargets mit dem Hordenstapel erstellen
- für F5 invers Biomechanik-Schalter ON
- F5 diagonal und nahe zur Handlungsstelle 6 platzieren
- F5 mit Anhängen z-Rotation und x-y-Verschiebung ausführen
- Speichern der Datei "Soll_Hordenwagen beladen_V1_Ausgpose.max"
Schritt 1

- Körperhaltungsanpassung für die Beschickung des obersten rechten Etagenfachs
Detailschritte:
- Hordenstapel über Rotation und Verschieben im Fach des Wagens platzieren
- abwechselnd Handtargets, Augentarget nachführen, Handstellung anpassen; ggf. Korrektur im Bone 89 (Steuerung der Wirbelsäule LWS, BWS); ggf. Verschieben von F5 gesamt
- die Handgelenke knicken wegen erschwerter Zugänglichkeit des Fachs ab: ControlD > RK Bone Animation > Bone Carpale L/R ==> x-Rotation
- Verschieben des Standorts von F5: F5 mit Anhängen selektieren außer Hand- und Augentargets und Translation ausführen
- OWAS-Bewertung aktivieren
- Speichern der Datei "Soll_Hordenwagen beladen_V1_Endpose_F5.max"
- Erkennbar wird, dass das Fach in aufrechter Haltung in Höhe Schulter beschickt werden kann, jedoch körperfern
- Vorteile: Hordenstapel der 2. bis 4. Etage können in die Fächer eingeschoben werden
Schritt 2

- Ermittlung der erforderlichen höchsten Wagenposition
Detailschritte:
- M95 mit Anhängen und einem Hordenstapel einblenden, alles weitere Zubehör ausblenden
- Person und Hordenstapel vor dem Wagen frontal ausrichten
- Horde mit einem Handtarget verknüpfen
- Augentarget und Augeneinstellungen deaktivieren (in RK Visibility Max.limit-Schalter OFF, GetoptimData setzen und Set Angles)
- optimal zulässige Rumpfbeugung im Bone 89 einstellen und im MonitrD: RK Bone > Torso-Femur-Winkel kontrollieren (ca. 10° Flexion)
- Handtargetposition der neuen Haltung anpassen: Greifraumgrenze bestimmen
- Hordenwagen nach oben verschieben (unterste Etage auf Handhöhe)
- Speichern der Datei "Soll_Hordenwagen beladen_V1_Endpose_M95.max"
- Der Wagen ist bis auf ca. 900 mm anzuheben.
In der Übung werden Vor- und Nachteile dieser Lösung diskutiert.
Variante 2: Gestufte Höhenanpassung des Wagens

Schritt 0
- Vorbereitung der Szene
- Der Wagen steht direkt neben dem Arbeitstisch auf dem Boden (dadurch tiefste Position der oberen Etagenfächer determiniert).
- Die höchste Position des Wagens wird durch die gerade noch zulässige Körperhaltung und der dadurch bedingten Handhöhe beider Referenzpersonen bestimmt.
- Der Abstand zwischen den Handhöhen der Grenzperzentile beeinflusst die Stufung der Höhenverstellung.
Detailschritte:
- Laden der Datei "Ausgang_Ist.max"
- Hordenwagen, M95 und F5 durch Translation und Rotation platzieren, alle anderen Szeneobjekte, die nicht benötigt werden, löschen oder ausblenden
- für beide Referenzpersonen Schalter Inverse Biomechanik OFF stellen
- Handkontaktpunkte und Handform einrichten
Schritt 1
- Einstellung einer zulässigen Körperhaltung
- zulässige Rumpfbeugung einstellen: ca. 20°
- Winkel in RK Bone Animation für Bone 89 einstellen: Kontrolle im MonitorD > RK Bone: ==> Winkel zwischen den Vektoren Femur und Torso
- Handtargets beider Referenzpersonen in eine gerade noch zulässige Position bringen
- Hände auf Hüfthöhe bringen
- Zu erkennen ist, dass M95 die 3. Etage gerade noch beschicken kann, jedoch an die beiden unteren Etagen nicht mehr ohne weitere Beugung heranreicht.
- M95 benötigt 2 Stufen der Wagenanhebung: Stufenhöhe = Fächerhöhe
- F5 benötigt nur eine Stufung von 1½ Fächerhöhe, jedoch verbessert die Stufung um Fächerhöhe die Körperhaltung.
- M95 ist hier i. S. worst case die maßgebliche Referenzperson.
- zulässige Rumpfbeugung einstellen: ca. 20°
Der Hordenwagen sollte demnach in 2 Stufen genau um Etagenhöhe höhenverstellbar ausgelegt sein. Vor- und Nachteile der Lösung werden in der Übung diskutiert.